List of mathematical symbols
This is a listing of common symbols found within all branches of mathematics. Each symbol is listed in both HTML, which depends on appropriate fonts being installed, and in TeX, as an image.
Contents |
Symbols
| Symbol in HTML |
Symbol in TeX |
Name | Explanation | Examples |
|---|---|---|---|---|
| Read as | ||||
| Category | ||||
 |
is equal to;
equals everywhere
|
x = y means x and y represent the same thing or value. | 2 = 2 1 + 1 = 2 |
|
 |
is not equal to;
does not equal everywhere
|
x ≠ y means that x and y do not represent the same thing or value. (The forms !=, /= or <> are generally used in programming languages where ease of typing and use of ASCII text is preferred.) |
2 + 2 ≠ 5 | |
  |
is less than,
is greater than |
x < y means x is less than y. x > y means x is greater than y. |
3 < 4 5 > 4 |
|
|
is a proper subgroup of
|
H < G means H is a proper subgroup of G. | 5Z < Z A3 < S3 |
||
  |
(very) strict inequality
is much less than,
is much greater than |
x ≪ y means x is much less than y. x ≫ y means x is much greater than y. |
0.003 ≪ 1000000 | |
|
asymptotic comparison
is of smaller order than,
is of greater order than |
f ≪ g means the growth of f is asymptotically bounded by g. (This is I. M. Vinogradov's notation. Another notation is the Big O notation, which looks like f = O(g).) |
x ≪ ex | ||
  |
is less than or equal to,
is greater than or equal to |
x ≤ y means x is less than or equal to y. x ≥ y means x is greater than or equal to y. (The forms <= and >= are generally used in programming languages where ease of typing and use of ASCII text is preferred.) |
3 ≤ 4 and 5 ≤ 5 5 ≥ 4 and 5 ≥ 5 |
|
|
is a subgroup of
|
H ≤ G means H is a subgroup of G. | Z ≤ Z A3 ≤ S3 |
||
|
is reducible to
|
A ≤ B means the problem A can be reduced to the problem B. Subscripts can be added to the ≤ to indicate what kind of reduction. | If
then |
||
|
≺
|
 |
is Karp reducible to;
is polynomial-time many-one reducible to |
L1 ≺ L2 means that the problem L1 is Karp reducible to L2.[1] | If L1 ≺ L2 and L2 ∈ P, then L1 ∈ P. |
 |
is proportional to;
varies as everywhere
|
y ∝ x means that y = kx for some constant k. | if y = 2x, then y ∝ x. | |
|
is Karp reducible to;
is polynomial-time many-one reducible to |
A ∝ B means the problem A can be polynomially reduced to the problem B. | If L1 ∝ L2 and L2 ∈ P, then L1 ∈ P. | ||
 |
plus;
add |
4 + 6 means the sum of 4 and 6. | 2 + 7 = 9 | |
|
the disjoint union of ... and ...
|
A1 + A2 means the disjoint union of sets A1 and A2. | A1 = {3, 4, 5, 6} ∧ A2 = {7, 8, 9, 10} ⇒ A1 + A2 = {(3,1), (4,1), (5,1), (6,1), (7,2), (8,2), (9,2), (10,2)} |
||
 |
9 − 4 means the subtraction of 4 from 9. | 8 − 3 = 5 | ||
|
negative;
minus; the opposite of |
−3 means the negative of the number 3. | −(−5) = 5 | ||
|
minus;
without |
A − B means the set that contains all the elements of A that are not in B. (∖ can also be used for set-theoretic complement as described below.) |
{1,2,4} − {1,3,4} = {2} | ||
 |
plus or minus
|
6 ± 3 means both 6 + 3 and 6 − 3. | The equation x = 5 ± √4, has two solutions, x = 7 and x = 3. | |
|
plus or minus
|
10 ± 2 or equivalently 10 ± 20% means the range from 10 − 2 to 10 + 2. | If a = 100 ± 1 mm, then a ≥ 99 mm and a ≤ 101 mm. | ||
 |
minus or plus
|
6 ± (3 ∓ 5) means both 6 + (3 − 5) and 6 − (3 + 5). | cos(x ± y) = cos(x) cos(y) ∓ sin(x) sin(y). | |
 |
times;
multiplied by |
3 × 4 means the multiplication of 3 by 4. (The symbol * is generally used in programming languages, where ease of typing and use of ASCII text is preferred.) |
7 × 8 = 56 | |
|
the Cartesian product of ... and ...;
the direct product of ... and ... |
X×Y means the set of all ordered pairs with the first element of each pair selected from X and the second element selected from Y. | {1,2} × {3,4} = {(1,3),(1,4),(2,3),(2,4)} | ||
|
cross
|
u × v means the cross product of vectors u and v | (1,2,5) × (3,4,−1) = (−22, 16, − 2) |
||
|
the group of units of
|
R× consists of the set of units of the ring R, along with the operation of multiplication. This may also be written R* as described below, or U(R). |
![\begin{align} (\mathbb{Z} / 5\mathbb{Z})^\times & = \{ [1], [2], [3], [4] \} \\ & \cong C_4 \\ \end{align}](/2012-wikipedia_en_all_nopic_01_2012/I/06f5c6ec9c5a7c6e00e8fd5e18529e9e.png) |
||
 |
times;
multiplied by |
a * b means the product of a and b. (Multiplication can also be denoted with × or ⋅, or even simple juxtaposition. * is generally used where ease of typing and use of ASCII text is preferred, such as programming languages.) |
4 * 3 means the product of 4 and 3, or 12. | |
|
convolution;
convolved with |
f * g means the convolution of f and g. |  . . |
||
|
conjugate
|
z* means the complex conjugate of z. (  can also be used for the conjugate of z, as described below.) can also be used for the conjugate of z, as described below.) |
 . . |
||
|
the group of units of
|
R* consists of the set of units of the ring R, along with the operation of multiplication. This may also be written R× as described above, or U(R). |
![\begin{align} (\mathbb{Z} / 5\mathbb{Z})^\ast & = \{ [1], [2], [3], [4] \} \\ & \cong C_4 \\ \end{align}](/2012-wikipedia_en_all_nopic_01_2012/I/01ce87251f2bb444b7e41b0592df6de8.png) |
||
|
the (set of) hyperreals
|
*R means the set of hyperreal numbers. Other sets can be used in place of R. | *N is the hypernatural numbers. | ||
|
Hodge dual;
Hodge star |
*v means the Hodge dual of a vector v. If v is a k-vector within an n-dimensional oriented inner product space, then *v is an (n−k)-vector. | If  are the standard basis vectors of are the standard basis vectors of  , ,  |
||
 |
times;
multiplied by |
3 · 4 means the multiplication of 3 by 4. | 7 · 8 = 56 | |
|
dot
|
u · v means the dot product of vectors u and v | (1,2,5) · (3,4,−1) = 6 | ||
|
placeholder
(silent)
|
A · means a placeholder for an argument of a function. Indicates the functional nature of an expression without assigning a specific symbol for an argument. |  |
||
|
⊗
|
 |
tensor product of
|
 means the tensor product of V and U.[3] means the tensor product of V and U.[3]  means the tensor product of modules V and U over the ring R. means the tensor product of modules V and U over the ring R. |
{1, 2, 3, 4} ⊗ {1, 1, 2} = {{1, 2, 3, 4}, {1, 2, 3, 4}, {2, 4, 6, 8}} |
  |
divided by;
over |
6 ÷ 3 or 6 ⁄ 3 means the division of 6 by 3. | 2 ÷ 4 = 0.5 12 ⁄ 4 = 3 |
|
|
mod
|
G / H means the quotient of group G modulo its subgroup H. | {0, a, 2a, b, b+a, b+2a} / {0, b} = {{0, b}, {a, b+a}, {2a, b+2a}} | ||
|
quotient set
mod
|
A/~ means the set of all ~ equivalence classes in A. | If we define ~ by x ~ y ⇔ x − y ∈ ℤ, then ℝ/~ = {x + n : n ∈ ℤ : x ∈ (0,1]} |
||
  |
the (principal) square root of
|
 means the nonnegative number whose square is means the nonnegative number whose square is  . . |
 |
|
|
the (complex) square root of
|
if  is represented in polar coordinates with is represented in polar coordinates with  , then , then  . . |
 |
||
 |
overbar;
… bar |
 (often read as “x bar”) is the mean (average value of (often read as “x bar”) is the mean (average value of  ). ). |
 . . |
|
|
conjugate
|
 means the complex conjugate of z. means the complex conjugate of z.(z* can also be used for the conjugate of z, as described above.) |
 . . |
||
|
algebraic closure of
|
 is the algebraic closure of the field F. is the algebraic closure of the field F. |
The field of algebraic numbers is sometimes denoted as  because it is the algebraic closure of the rational numbers because it is the algebraic closure of the rational numbers  . . |
||
|
(topological) closure of
|
 is the topological closure of the set S. is the topological closure of the set S.This may also be denoted as cl(S) or Cl(S). |
In the space of the real numbers,  (the rational numbers are dense in the real numbers). (the rational numbers are dense in the real numbers). |
||
|
|…|
|
 |
absolute value;
modulus absolute value of; modulus of
|
|x| means the distance along the real line (or across the complex plane) between x and zero. | |3| = 3 |–5| = |5| = 5 | i | = 1 | 3 + 4i | = 5 |
|
Euclidean norm or Euclidean length or magnitude
Euclidean norm of
|
|x| means the (Euclidean) length of vector x. | For x = (3,-4) |
||
|
determinant of
|
|A| means the determinant of the matrix A |  |
||
|
cardinality of;
size of; order of |
|X| means the cardinality of the set X. (# may be used instead as described below.) |
|{3, 5, 7, 9}| = 4. | ||
|
||…||
|
 |
norm of;
length of |
|| x || means the norm of the element x of a normed vector space.[4] | || x + y || ≤ || x || + || y || |
|
nearest integer to
|
||x|| means the nearest integer to x. (This may also be written [x], ⌊x⌉, nint(x) or Round(x).) |
||1|| = 1, ||1.6|| = 2, ||−2.4|| = −2, ||3.49|| = 3 | ||
  |
divides
|
a|b means a divides b. a∤b means a does not divide b. (This symbol can be difficult to type, and its negation is rare, so a regular but slightly shorter vertical bar | character can be used.) |
Since 15 = 3×5, it is true that 3|15 and 5|15. | |
|
given
|
P(A|B) means the probability of the event a occurring given that b occurs. | if X is a uniformly random day of the year P(X is May 25 | X is in May) = 1/31 | ||
|
restriction of … to …;
restricted to |
f|A means the function f restricted to the set A, that is, it is the function with domain A ∩ dom(f) that agrees with f. | The function f : R → R defined by f(x) = x2 is not injective, but f|R+ is injective. | ||
|
such that
such that;
so that everywhere
|
| means “such that”, see ":" (described below). | S = {(x,y) | 0 < y < f(x)} The set of (x,y) such that y is greater than 0 and less than f(x). |
||
|
||
|
 |
is parallel to
|
x || y means x is parallel to y. | If l || m and m ⊥ n then l ⊥ n. |
|
is incomparable to
|
x || y means x is incomparable to y. | {1,2} || {2,3} under set containment. | ||
|
exact divisibility
exactly divides
|
pa || n means pa exactly divides n (i.e. pa divides n but pa+1 does not). | 23 || 360. | ||
 |
cardinality of;
size of; order of |
#X means the cardinality of the set X. (|…| may be used instead as described above.) |
#{4, 6, 8} = 3 | |
|
connected sum of;
knot sum of; knot composition of |
A#B is the connected sum of the manifolds A and B. If A and B are knots, then this denotes the knot sum, which has a slightly stronger condition. | A#Sm is homeomorphic to A, for any manifold A, and the sphere Sm. | ||
 |
aleph
|
ℵα represents an infinite cardinality (specifically, the α-th one, where α is an ordinal). | |ℕ| = ℵ0, which is called aleph-null. | |
 |
beth
|
ℶα represents an infinite cardinality (similar to ℵ, but ℶ does not necessarily index all of the numbers indexed by ℵ. ). |  |
|
|
𝔠
|
 |
cardinality of the continuum;
c; cardinality of the real numbers |
The cardinality of  is denoted by is denoted by  or by the symbol or by the symbol  (a lowercase Fraktur letter C). (a lowercase Fraktur letter C). |
 |
 |
such that
such that;
so that everywhere
|
: means “such that”, and is used in proofs and the set-builder notation (described below). | ∃ n ∈ ℕ: n is even. | |
|
extends;
over |
K : F means the field K extends the field F. This may also be written as K ≥ F. |
ℝ : ℚ | ||
|
inner product of matrices
inner product of
|
A : B means the Frobenius inner product of the matrices A and B. The general inner product is denoted by ⟨u, v⟩, ⟨u | v⟩ or (u | v), as described below. For spatial vectors, the dot product notation, x·y is common. See also Bra-ket notation. |
 |
||
|
index of subgroup
|
The index of a subgroup H in a group G is the "relative size" of H in G: equivalently, the number of "copies" (cosets) of H that fill up G |  |
||
 |
factorial
|
n! means the product 1 × 2 × ... × n. | 4! = 1 × 2 × 3 × 4 = 24 | |
|
not
|
The statement !A is true if and only if A is false. A slash placed through another operator is the same as "!" placed in front. (The symbol ! is primarily from computer science. It is avoided in mathematical texts, where the notation ¬A is preferred.) |
!(!A) ⇔ A x ≠ y ⇔ !(x = y) |
||
 |
has distribution
|
X ~ D, means the random variable X has the probability distribution D. | X ~ N(0,1), the standard normal distribution | |
|
is row equivalent to
|
A~B means that B can be generated by using a series of elementary row operations on A |  |
||
|
same order of magnitude
roughly similar;
poorly approximates |
m ~ n means the quantities m and n have the same order of magnitude, or general size. (Note that ~ is used for an approximation that is poor, otherwise use ≈ .) |
2 ~ 5 8 × 9 ~ 100 but π2 ≈ 10 |
||
|
is asymptotically equivalent to
|
f ~ g means  . . |
x ~ x+1 | ||
|
are in the same equivalence class
everywhere
|
a ~ b means ![b \in [a]](/2012-wikipedia_en_all_nopic_01_2012/I/6769b7a159bc917be1478849db21b7ae.png) (and equivalently (and equivalently ![a \in [b]](/2012-wikipedia_en_all_nopic_01_2012/I/3ec8d0d70da247252e9aa1380a011f27.png) ). ). |
1 ~ 5 mod 4 | ||
 |
approximately equal
is approximately equal to
everywhere
|
x ≈ y means x is approximately equal to y. This may also be written ≃, ≅, ~ or ≒. |
π ≈ 3.14159 | |
|
is isomorphic to
|
G ≈ H means that group G is isomorphic (structurally identical) to group H. (≅ can also be used for isomorphic, as described below.) |
Q / {1, −1} ≈ V, where Q is the quaternion group and V is the Klein four-group. |
||
|
≀
|
 |
wreath product of … by …
|
A ≀ H means the wreath product of the group A by the group H. This may also be written A wr H. |
 is isomorphic to the automorphism group of the complete bipartite graph on (n,n) vertices. is isomorphic to the automorphism group of the complete bipartite graph on (n,n) vertices. |
|
◅
▻ |
  |
is a normal subgroup of
|
N ◅ G means that N is a normal subgroup of group G. | Z(G) ◅ G |
|
is an ideal of
|
I ◅ R means that I is an ideal of ring R. | (2) ◅ Z | ||
|
the antijoin of
|
R ▻ S means the antijoin of the relations R and S, the tuples in R for which there is not a tuple in S that is equal on their common attribute names. | R  S = R - R S = R - R  S S |
||
|
⋉
⋊ |
  |
the semidirect product of
|
N ⋊φ H is the semidirect product of N (a normal subgroup) and H (a subgroup), with respect to φ. Also, if G = N ⋊φ H, then G is said to split over N. (⋊ may also be written the other way round, as ⋉, or as ×.) |
 |
|
the semijoin of
|
R ⋉ S is the semijoin of the relations R and S, the set of all tuples in R for which there is a tuple in S that is equal on their common attribute names. | R S =  a1,..,an(R a1,..,an(R  S) S) |
||
|
⋈
|
 |
the natural join of
|
R ⋈ S is the natural join of the relations R and S, the set of all combinations of tuples in R and S that are equal on their common attribute names. | |
 |
therefore;
so; hence everywhere
|
Sometimes used in proofs before logical consequences. | All humans are mortal. Socrates is a human. ∴ Socrates is mortal. | |
 |
because
because;
since everywhere
|
Sometimes used in proofs before reasoning. | 3331 is prime ∵ it has no positive integer factors other than itself and one. | |
   |
everywhere
|
Used to mark the end of a proof. (May also be written Q.E.D.) |
||
|
non-Euclidean Laplacian
|
It is the generalisation of the Laplace operator in the sense that it is the differential operator which is invariant under the isometry group of the underlying space and it reduces to the Laplace operator if restricted to time independent functions. |  |
||
|
⇒
→ ⊃ |
   |
implies;
if … then |
A ⇒ B means if A is true then B is also true; if A is false then nothing is said about B. (→ may mean the same as ⇒, or it may have the meaning for functions given below.) (⊃ may mean the same as ⇒,[5] or it may have the meaning for superset given below.) |
x = 2 ⇒ x2 = 4 is true, but x2 = 4 ⇒ x = 2 is in general false (since x could be −2). |
|
⇔
↔ |
  |
if and only if;
iff |
A ⇔ B means A is true if B is true and A is false if B is false. | x + 5 = y + 2 ⇔ x + 3 = y |
 |
not
|
The statement ¬A is true if and only if A is false. A slash placed through another operator is the same as "¬" placed in front. (The symbol ~ has many other uses, so ¬ or the slash notation is preferred. Computer scientists will often use ! but this is avoided in mathematical texts.) |
¬(¬A) ⇔ A x ≠ y ⇔ ¬(x = y) |
|
|
∧
|
 |
logical conjunction or meet in a lattice
and;
min; meet |
The statement A ∧ B is true if A and B are both true; else it is false. For functions A(x) and B(x), A(x) ∧ B(x) is used to mean min(A(x), B(x)). |
n < 4 ∧ n >2 ⇔ n = 3 when n is a natural number. |
|
wedge product;
exterior product |
u ∧ v means the wedge product of vectors u and v. This generalizes the cross product to higher dimensions. (For vectors in R3, × can also be used.) |
 |
||
|
… (raised) to the power of …
everywhere
|
a ^ b means a raised to the power of b (a ^ b is more commonly written ab. The symbol ^ is generally used in programming languages where ease of typing and use of plain ASCII text is preferred.) |
2^3 = 23 = 8 | ||
|
∨
|
 |
logical disjunction or join in a lattice
or;
max; join |
The statement A ∨ B is true if A or B (or both) are true; if both are false, the statement is false. For functions A(x) and B(x), A(x) ∨ B(x) is used to mean max(A(x), B(x)). |
n ≥ 4 ∨ n ≤ 2 ⇔ n ≠ 3 when n is a natural number. |
|
⊕
⊻ |
  |
xor
|
The statement A ⊕ B is true when either A or B, but not both, are true. A ⊻ B means the same. | (¬A) ⊕ A is always true, A ⊕ A is always false. |
|
direct sum of
|
The direct sum is a special way of combining several objects into one general object. (The bun symbol ⊕, or the coproduct symbol ∐, is used; ⊻ is only for logic.) |
Most commonly, for vector spaces U, V, and W, the following consequence is used: U = V ⊕ W ⇔ (U = V + W) ∧ (V ∩ W = {0}) |
||
 |
for all;
for any; for each |
∀ x: P(x) means P(x) is true for all x. | ∀ n ∈ ℕ: n2 ≥ n. | |
|
∃
|
 |
there exists;
there is; there are |
∃ x: P(x) means there is at least one x such that P(x) is true. | ∃ n ∈ ℕ: n is even. |
|
∃!
|
 |
there exists exactly one
|
∃! x: P(x) means there is exactly one x such that P(x) is true. | ∃! n ∈ ℕ: n + 5 = 2n. |
       |
is defined as;
is equal by definition to everywhere
|
x := y, y =: x or x ≡ y means x is defined to be another name for y, under certain assumptions taken in context. (Some writers use ≡ to mean congruence). P :⇔ Q means P is defined to be logically equivalent to Q. |
 |
|
|
≅
|
 |
is congruent to
|
△ABC ≅ △DEF means triangle ABC is congruent to (has the same measurements as) triangle DEF. | |
|
is isomorphic to
|
G ≅ H means that group G is isomorphic (structurally identical) to group H. (≈ can also be used for isomorphic, as described above.) |
 . . |
||
|
... is congruent to ... modulo ...
|
a ≡ b (mod n) means a − b is divisible by n | 5 ≡ 2 (mod 3) | |
 |
set brackets
the set of …
|
{a,b,c} means the set consisting of a, b, and c.[6] | ℕ = { 1, 2, 3, …} | |
|
{ : }
{ | } |
  |
the set of … such that
|
{x : P(x)} means the set of all x for which P(x) is true.[6] {x | P(x)} is the same as {x : P(x)}. | {n ∈ ℕ : n2 < 20} = { 1, 2, 3, 4} |
   |
the empty set
|
∅ means the set with no elements.[6] { } means the same. | {n ∈ ℕ : 1 < n2 < 4} = ∅ | |
|
∈
∉ |
  |
is an element of;
is not an element of everywhere, set theory
|
a ∈ S means a is an element of the set S;[6] a ∉ S means a is not an element of S.[6] | (1/2)−1 ∈ ℕ 2−1 ∉ ℕ |
|
⊆
⊂ |
  |
is a subset of
|
(subset) A ⊆ B means every element of A is also an element of B.[7] (proper subset) A ⊂ B means A ⊆ B but A ≠ B. (Some writers use the symbol ⊂ as if it were the same as ⊆.) |
(A ∩ B) ⊆ A ℕ ⊂ ℚ ℚ ⊂ ℝ |
|
⊇
⊃ |
 |
is a superset of
|
A ⊇ B means every element of B is also an element of A. A ⊃ B means A ⊇ B but A ≠ B. (Some writers use the symbol ⊃ as if it were the same as ⊇.) |
(A ∪ B) ⊇ B ℝ ⊃ ℚ |
|
∪
|
 |
the union of … or …;
union |
A ∪ B means the set of those elements which are either in A, or in B, or in both.[7] | A ⊆ B ⇔ (A ∪ B) = B |
|
∩
|
 |
intersected with;
intersect |
A ∩ B means the set that contains all those elements that A and B have in common.[7] | {x ∈ ℝ : x2 = 1} ∩ ℕ = {1} |
|
∆
|
 |
symmetric difference
|
A ∆ B means the set of elements in exactly one of A or B. (Not to be confused with delta, Δ, described below.) |
{1,5,6,8} ∆ {2,5,8} = {1,2,6} |
|
∖
|
 |
minus;
without |
A ∖ B means the set that contains all those elements of A that are not in B.[7] (− can also be used for set-theoretic complement as described above.) |
{1,2,3,4} ∖ {3,4,5,6} = {1,2} |
 |
function arrow
from … to
|
f: X → Y means the function f maps the set X into the set Y. | Let f: ℤ → ℕ∪{0} be defined by f(x) := x2. | |
|
↦
|
 |
function arrow
maps to
|
f: a ↦ b means the function f maps the element a to the element b. | Let f: x ↦ x+1 (the successor function). |
|
∘
|
 |
composed with
|
f∘g is the function, such that (f∘g)(x) = f(g(x)).[8] | if f(x) := 2x, and g(x) := x + 3, then (f∘g)(x) = 2(x + 3). |
  |
N;
the (set of) natural numbers |
N means either { 0, 1, 2, 3, ...} or { 1, 2, 3, ...}. The choice depends on the area of mathematics being studied; e.g. number theorists prefer the latter; analysts, set theorists and computer scientists prefer the former. To avoid confusion, always check an author's definition of N. Set theorists often use the notation ω (for least infinite ordinal) to denote the set of natural numbers (including zero), along with the standard ordering relation ≤. |
ℕ = {|a| : a ∈ ℤ} or ℕ = {|a| > 0: a ∈ ℤ} | |
  |
Z;
the (set of) integers |
ℤ means {..., −3, −2, −1, 0, 1, 2, 3, ...}.
ℤ+ or ℤ> means {1, 2, 3, ...} . ℤ* or ℤ≥ means {0, 1, 2, 3, ...} . |
ℤ = {p, −p : p ∈ ℕ ∪ {0}} | |
|
ℤn
ℤp Zn Zp |
    |
Zn;
the (set of) integers modulo n |
ℤn means {[0], [1], [2], ...[n−1]} with addition and multiplication modulo n. Note that any letter may be used instead of n, such as p. To avoid confusion with p-adic numbers, use ℤ/pℤ or ℤ/(p) instead. |
ℤ3 = {[0], [1], [2]} |
|
the (set of) p-adic integers
|
Note that any letter may be used instead of p, such as n or l. |
|||
  |
P;
the projective space; the projective line; the projective plane |
ℙ means a space with a point at infinity. |  , , |
|
|
the probability of
|
ℙ(X) means the probability of the event X occurring. This may also be written as P(X), Pr(X), P[X] or Pr[X]. |
If a fair coin is flipped, ℙ(Heads) = ℙ(Tails) = 0.5. | ||
  |
Q;
the (set of) rational numbers; the rationals |
ℚ means {p/q : p ∈ ℤ, q ∈ ℕ}. | 3.14000... ∈ ℚ π ∉ ℚ |
|
  |
R;
the (set of) real numbers; the reals |
ℝ means the set of real numbers. | π ∈ ℝ √(−1) ∉ ℝ |
|
  |
C;
the (set of) complex numbers |
ℂ means {a + b i : a,b ∈ ℝ}. | i = √(−1) ∈ ℂ | |
  |
quaternions or Hamiltonian quaternions
H;
the (set of) quaternions |
ℍ means {a + b i + c j + d k : a,b,c,d ∈ ℝ}. | ||
 |
big-oh of
|
The Big O notation describes the limiting behavior of a function, when the argument tends towards a particular value or infinity. | If f(x) = 6x4 − 2x3 + 5 and g(x) = x4 , then  |
|
 |
infinity
|
∞ is an element of the extended number line that is greater than all real numbers; it often occurs in limits. |  |
|
|
⌊…⌋
|
 |
floor;
greatest integer; entier |
⌊x⌋ means the floor of x, i.e. the largest integer less than or equal to x. (This may also be written [x], floor(x) or int(x).) |
⌊4⌋ = 4, ⌊2.1⌋ = 2, ⌊2.9⌋ = 2, ⌊−2.6⌋ = −3 |
|
⌈…⌉
|
 |
ceiling
|
⌈x⌉ means the ceiling of x, i.e. the smallest integer greater than or equal to x. (This may also be written ceil(x) or ceiling(x).) |
⌈4⌉ = 4, ⌈2.1⌉ = 3, ⌈2.9⌉ = 3, ⌈−2.6⌉ = −2 |
|
⌊…⌉
|
 |
nearest integer to
|
⌊x⌉ means the nearest integer to x. (This may also be written [x], ||x||, nint(x) or Round(x).) |
⌊2⌉ = 2, ⌊2.6⌉ = 3, ⌊-3.4⌉ = -3, ⌊4.49⌉ = 4 |
|
[ : ]
|
![[\�:\ ] \!\,](/2012-wikipedia_en_all_nopic_01_2012/I/39d5340377c7738ba4f72a9739f63afe.png) |
the degree of
|
[K : F] means the degree of the extension K : F. | [ℚ(√2) : ℚ] = 2 [ℂ : ℝ] = 2 [ℝ : ℚ] = ∞ |
![[\ ] \!\,](/2012-wikipedia_en_all_nopic_01_2012/I/c2dc57d3486acdb1ec8efad3719a2757.png) ![[\ ,\ ] \!\,](/2012-wikipedia_en_all_nopic_01_2012/I/691075e7366c90a8857edd45a2053aa8.png) ![[\ ,\ ,\ ] \!\,](/2012-wikipedia_en_all_nopic_01_2012/I/f2a7f66d6e7f58cba58ee0148f6b824e.png) |
the equivalence class of
|
[a] means the equivalence class of a, i.e. {x : x ~ a}, where ~ is an equivalence relation. [a]R means the same, but with R as the equivalence relation. |
Let a ~ b be true iff a ≡ b (mod 5).
Then [2] = {…, −8, −3, 2, 7, …}. |
|
|
floor;
greatest integer; entier |
[x] means the floor of x, i.e. the largest integer less than or equal to x. (This may also be written ⌊x⌋, floor(x) or int(x). Not to be confused with the nearest integer function, as described below.) |
[3] = 3, [3.5] = 3, [3.99] = 3, [−3.7] = −4 | ||
|
nearest integer to
|
[x] means the nearest integer to x. (This may also be written ⌊x⌉, ||x||, nint(x) or Round(x). Not to be confused with the floor function, as described above.) |
[2] = 2, [2.6] = 3, [-3.4] = -3, [4.49] = 4 | ||
|
1 if true, 0 otherwise
|
[S] maps a true statement S to 1 and a false statement S to 0. | [0=5]=0, [7>0]=1, [2 ∈ {2,3,4}]=1, [5 ∈ {2,3,4}]=0 | ||
|
image of … under …
everywhere
|
f[X] means { f(x) : x ∈ X }, the image of the function f under the set X ⊆ dom(f). (This may also be written as f(X) if there is no risk of confusing the image of f under X with the function application f of X. Another notation is Im f, the image of f under its domain.) |
![\sin [\mathbb{R}] = [-1, 1]](/2012-wikipedia_en_all_nopic_01_2012/I/1f5029b9f82b8f23f5e659573ce1f072.png) |
||
|
closed interval
|
![[a,b] = \{x \in \mathbb{R}�: a \le x \le b \}](/2012-wikipedia_en_all_nopic_01_2012/I/d6fb4b1478e9c68e216dcf78d4941dca.png) . . |
0 and 1/2 are in the interval [0,1]. | ||
|
the commutator of
|
[g, h] = g−1h−1gh (or ghg−1h−1), if g, h ∈ G (a group). [a, b] = ab − ba, if a, b ∈ R (a ring or commutative algebra). |
xy = x[x, y] (group theory). [AB, C] = A[B, C] + [A, C]B (ring theory). |
||
|
the triple scalar product of
|
[a, b, c] = a × b · c, the scalar product of a × b with c. | [a, b, c] = [b, c, a] = [c, a, b]. | ||
  |
function application
of
|
f(x) means the value of the function f at the element x. | If f(x) := x2, then f(3) = 32 = 9. | |
|
image of … under …
everywhere
|
f(X) means { f(x) : x ∈ X }, the image of the function f under the set X ⊆ dom(f). (This may also be written as f[X] if there is a risk of confusing the image of f under X with the function application f of X. Another notation is Im f, the image of f under its domain.) |
![\sin (\mathbb{R}) = [-1, 1]](/2012-wikipedia_en_all_nopic_01_2012/I/b93332278134196d51888697a1eb63a6.png) |
||
|
(from) n choose r
|
 means the number of combinations of r elements drawn from a set of n elements. means the number of combinations of r elements drawn from a set of n elements.(This may also be written as nCr.) |
 |
||
|
precedence grouping
parentheses
everywhere
|
Perform the operations inside the parentheses first. | (8/4)/2 = 2/2 = 1, but 8/(4/2) = 8/2 = 4. | ||
|
tuple; n-tuple;
ordered pair/triple/etc; row vector; sequence everywhere
|
An ordered list (or sequence, or horizontal vector, or row vector) of values.
(Note that the notation (a,b) is ambiguous: it could be an ordered pair or an open interval. Set theorists and computer scientists often use angle brackets ⟨ ⟩ instead of parentheses.) |
(a, b) is an ordered pair (or 2-tuple).
(a, b, c) is an ordered triple (or 3-tuple). ( ) is the empty tuple (or 0-tuple). |
||
|
highest common factor;
greatest common divisor; hcf; gcd number theory
|
(a, b) means the highest common factor of a and b. (This may also be written hcf(a, b) or gcd(a, b).) |
(3, 7) = 1 (they are coprime); (15, 25) = 5. | ||
|
( , )
] , [ |
![]\ ,\ [ \!\,](/2012-wikipedia_en_all_nopic_01_2012/I/56ae0d842e03b2b7504f316f176a3467.png) |
open interval
|
 . .
(Note that the notation (a,b) is ambiguous: it could be an ordered pair or an open interval. The notation ]a,b[ can be used instead.) |
4 is not in the interval (4, 18).
(0, +∞) equals the set of positive real numbers. |
|
( , ]
] , ] |
![(\ ,\ ] \!\,](/2012-wikipedia_en_all_nopic_01_2012/I/b2217c84cbe375b0506b8429a6f69258.png) ![]\ ,\ ] \!\,](/2012-wikipedia_en_all_nopic_01_2012/I/1f129e23b31f26cf551000acaed7e18c.png) |
half-open interval;
left-open interval |
![(a,b] = \{x \in \mathbb{R}�: a < x \le b \}](/2012-wikipedia_en_all_nopic_01_2012/I/da9d325123d50dbc4e36363f2863ce3e.png) . . |
(−1, 7] and (−∞, −1] |
|
[ , )
[ , [ |
  |
half-open interval;
right-open interval |
 . . |
[4, 18) and [1, +∞) |
|
⟨⟩
⟨,⟩ |
  |
inner product of
|
⟨u,v⟩ means the inner product of u and v, where u and v are members of an inner product space. Note that the notation ⟨u, v⟩ may be ambiguous: it could mean the inner product or the linear span. There are many variants of the notation, such as ⟨u | v⟩ and (u | v), which are described below. For spatial vectors, the dot product notation, x·y is common. For matrices, the colon notation A : B may be used. As ⟨ and ⟩ can be hard to type, the more “keyboard friendly” forms < and > are sometimes seen. These are avoided in mathematical texts. |
The standard inner product between two vectors x = (2, 3) and y = (−1, 5) is: ⟨x, y⟩ = 2 × −1 + 3 × 5 = 13 |
|
average of
|
let S be a subset of N for example,  represents the average of all the element in S. represents the average of all the element in S. |
for a time series :g(t) (t = 1, 2,...)
we can define the structure functions Sq( |
||
|
(linear) span of;
linear hull of |
⟨S⟩ means the span of S ⊆ V. That is, it is the intersection of all subspaces of V which contain S. ⟨u1, u2, …⟩is shorthand for ⟨{u1, u2, …}⟩.
Note that the notation ⟨u, v⟩ may be ambiguous: it could mean the inner product or the linear span. |
 . . |
||
|
subgroup generated by a set
the subgroup generated by
|
means the smallest subgroup of G (where S ⊆ G, a group) containing every element of S. is shorthand for is shorthand for  . . |
In S3,  and and  . . |
||
|
tuple; n-tuple;
ordered pair/triple/etc; row vector; sequence everywhere
|
An ordered list (or sequence, or horizontal vector, or row vector) of values.
(The notation (a,b) is often used as well.) |
 is an ordered pair (or 2-tuple). is an ordered pair (or 2-tuple).
|
||
|
⟨|⟩
(|) |
  |
inner product of
|
⟨u | v⟩ means the inner product of u and v, where u and v are members of an inner product space.[9] (u | v) means the same. Another variant of the notation is ⟨u, v⟩ which is described above. For spatial vectors, the dot product notation, x·y is common. For matrices, the colon notation A : B may be used. As ⟨ and ⟩ can be hard to type, the more “keyboard friendly” forms < and > are sometimes seen. These are avoided in mathematical texts. |
|
|
|⟩
|
 |
the ket …;
the vector … |
|φ⟩ means the vector with label φ, which is in a Hilbert space. | A qubit's state can be represented as α|0⟩+ β|1⟩, where α and β are complex numbers s.t. |α|2 + |β|2 = 1. |
|
⟨|
|
 |
the bra …;
the dual of … |
⟨φ| means the dual of the vector |φ⟩, a linear functional which maps a ket |ψ⟩ onto the inner product ⟨φ|ψ⟩. | |
 |
sum over … from … to … of
|
 means a1 + a2 + … + an. means a1 + a2 + … + an. |
 = 12 + 22 + 32 + 42 = 12 + 22 + 32 + 42
|
|
 |
product over … from … to … of
|
 means a1a2···an. means a1a2···an. |
 = (1+2)(2+2)(3+2)(4+2) = (1+2)(2+2)(3+2)(4+2)
|
|
|
the Cartesian product of;
the direct product of |
 means the set of all (n+1)-tuples means the set of all (n+1)-tuples
|
 |
||
|
∐
|
 |
coproduct over … from … to … of
|
A general construction which subsumes the disjoint union of sets and of topological spaces, the free product of groups, and the direct sum of modules and vector spaces. The coproduct of a family of objects is essentially the "least specific" object to which each object in the family admits a morphism. | |
 |
delta;
change in |
Δx means a (non-infinitesimal) change in x. (If the change becomes infinitesimal, δ and even d are used instead. Not to be confused with the symmetric difference, written ∆, above.) |
 is the gradient of a straight line is the gradient of a straight line |
|
|
Laplace operator
|
The Laplace operator is a second order differential operator in n-dimensional Euclidean space | If ƒ is a twice-differentiable real-valued function, then the Laplacian of ƒ is defined by  |
||
 |
Dirac delta of
|
 |
δ(x) | |
|
Kronecker delta of
|
 |
δij | ||
 |
partial;
d |
∂f/∂xi means the partial derivative of f with respect to xi, where f is a function on (x1, …, xn). | If f(x,y) := x2y, then ∂f/∂x = 2xy | |
|
boundary of
|
∂M means the boundary of M | ∂{x : ||x|| ≤ 2} = {x : ||x|| = 2} | ||
|
degree of
|
∂f means the degree of the polynomial f. (This may also be written deg f.) |
∂(x2 − 1) = 2 | ||
 |
∇f (x1, …, xn) is the vector of partial derivatives (∂f / ∂x1, …, ∂f / ∂xn). | If f (x,y,z) := 3xy + z², then ∇f = (3y, 3x, 2z) | ||
|
del dot;
divergence of |
 |
If  , then , then  . . |
||
|
curl of
|
  |
If , then  . . |
||
 |
… prime;
derivative of |
f ′(x) means the derivative of the function f at the point x, i.e., the slope of the tangent to f at x. (The single-quote character ' is sometimes used instead, especially in ASCII text.) |
If f(x) := x2, then f ′(x) = 2x | |
 |
… dot;
time derivative of |
 means the derivative of x with respect to time. That is means the derivative of x with respect to time. That is 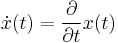 . . |
If x(t) := t2, then  . . |
|
 |
indefinite integral of
the antiderivative of |
∫ f(x) dx means a function whose derivative is f. | ∫x2 dx = x3/3 + C | |
|
integral from … to … of … with respect to
|
∫ab f(x) dx means the signed area between the x-axis and the graph of the function f between x = a and x = b. | ∫ab x2 dx = b3/3 − a3/3; | ||
|
line/ path/ curve/ integral of… along…
|
∫C f ds means the integral of f along the curve C,  , where r is a parametrization of C. , where r is a parametrization of C.(If the curve is closed, the symbol ∮ may be used instead, as described below.) |
|||
|
∮
|
 |
Contour integral;
closed line integral contour integral of
|
Similar to the integral, but used to denote a single integration over a closed curve or loop. It is sometimes used in physics texts involving equations regarding Gauss's Law, and while these formulas involve a closed surface integral, the representations describe only the first integration of the volume over the enclosing surface. Instances where the latter requires simultaneous double integration, the symbol ∯ would be more appropriate. A third related symbol is the closed volume integral, denoted by the symbol ∰.
The contour integral can also frequently be found with a subscript capital letter C, ∮C, denoting that a closed loop integral is, in fact, around a contour C, or sometimes dually appropriately, a circle C. In representations of Gauss's Law, a subscript capital S, ∮S, is used to denote that the integration is over a closed surface. |
If C is a Jordan curve about 0, then 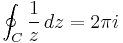 . . |
 |
Projection of
|
 restricts restricts  to the to the  attribute set. attribute set. |
 |
|
|
pi;
3.1415926; ≈22÷7 |
Used in various formulas involving circles; π is equivalent to the amount of area a circle would take up in a square of equal width with an area of 4 square units, roughly 3.14/4. It is also the ratio of the circumference to the diameter of a circle. | A=πR2=314.16→R=10 | ||
 |
Selection of
|
The selection  selects all those tuples in for which selects all those tuples in for which  holds between the holds between the  and the and the  attribute. The selection attribute. The selection  selects all those tuples in for which holds between the attribute and the value selects all those tuples in for which holds between the attribute and the value  . . |
  |
|
|
<:
<· |
  |
is covered by
|
x <• y means that x is covered by y. | {1, 8} <• {1, 3, 8} among the subsets of {1, 2, …, 10} ordered by containment. |
|
is a subtype of
|
T1 <: T2 means that T1 is a subtype of T2. | If S <: T and T <: U then S <: U (transitivity). | ||
 |
conjugate transpose;
adjoint; Hermitian adjoint/conjugate/transpose |
A† means the transpose of the complex conjugate of A.[10] This may also be written A*T, AT*, A*, AT or AT. |
If A = (aij) then A† = (aji). | |
 |
transpose
|
AT means A, but with its rows swapped for columns. This may also be written A', At or Atr. |
If A = (aij) then AT = (aji). | |
|
⊤
|
 |
the top element
|
⊤ means the largest element of a lattice. | ∀x : x ∨ ⊤ = ⊤ |
|
the top type; top
|
⊤ means the top or universal type; every type in the type system of interest is a subtype of top. | ∀ types T, T <: ⊤ | ||
|
⊥
|
 |
is perpendicular to
|
x ⊥ y means x is perpendicular to y; or more generally x is orthogonal to y. | If l ⊥ m and m ⊥ n in the plane, then l || n. |
|
orthogonal/ perpendicular complement of;
perp |
W⊥ means the orthogonal complement of W (where W is a subspace of the inner product space V), the set of all vectors in V orthogonal to every vector in W. | Within  , ,  . . |
||
|
is coprime to
|
x ⊥ y means x has no factor greater than 1 in common with y. | 34 ⊥ 55. | ||
|
is independent of
|
A ⊥ B means A is an event whose probability is independent of event B. | If A ⊥ B, then P(A|B) = P(A). | ||
|
the bottom element
|
⊥ means the smallest element of a lattice. | ∀x : x ∧ ⊥ = ⊥ | ||
|
the bottom type;
bot |
⊥ means the bottom type (a.k.a. the zero type or empty type); bottom is the subtype of every type in the type system. | ∀ types T, ⊥ <: T | ||
|
is comparable to
|
x ⊥ y means that x is comparable to y. | {e, π} ⊥ {1, 2, e, 3, π} under set containment. | ||
|
⊧
|
 |
entails
|
A ⊧ B means the sentence A entails the sentence B, that is in every model in which A is true, B is also true. | A ⊧ A ∨ ¬A |
|
⊢
|
 |
infers;
is derived from |
x ⊢ y means y is derivable from x. | A → B ⊢ ¬B → ¬A. |
|
is a partition of
|
p ⊢ n means that p is a partition of n. | (4,3,1,1) ⊢ 9, 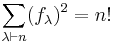 . . |
||
|
o
|
|
entrywise product
|
For two matrices (or vectors) of the same dimensions  the Hadamard product is a matrix of the same dimensions the Hadamard product is a matrix of the same dimensions  with elements given by with elements given by  . This is often used in matrix based programming such as MATLAB where the operation is done by A.*B . This is often used in matrix based programming such as MATLAB where the operation is done by A.*B |
 |


 ):
):
 is an ordered triple (or 3-tuple).
is an ordered triple (or 3-tuple). is the
is the Variations
In mathematics written in Arabic, some symbols may be reversed to make right-to-left writing and reading easier. [11]
See also
- Greek letters used in mathematics, science, and engineering
- ISO 31-11
- List of mathematical abbreviations
- Mathematical alphanumeric symbols
- Mathematical notation
- Notation in probability and statistics
- Physical constants
- Roman letters used in mathematics
- Table of logic symbols
- Table of mathematical symbols by introduction date
- Unicode mathematical operators
References
- ^ Rónyai, Lajos (1998), Algoritmusok(Algorithms), TYPOTEX, ISBN 963-9132-16-0
- ^ Berman, Kenneth A; Paul, Jerome L. (2005), Algorithms: Sequential, Parallel, and Distributed, Boston: Course Technology, p. 822, ISBN 0-534-42057-5
- ^ Nielsen, Michael A; Chuang, Isaac L (2000), Quantum Computation and Quantum Information, New York: Cambridge University Press, pp. 71–72, ISBN 0-521-63503-9, OCLC 43641333
- ^ Nielsen, Michael A; Chuang, Isaac L (2000), Quantum Computation and Quantum Information, New York: Cambridge University Press, p. 66, ISBN 0-521-63503-9, OCLC 43641333
- ^ Copi, Irving M.; Cohen, Carl (1990) [1953], "Chapter 8.3: Conditional Statements and Material Implication", Introduction to Logic (8th ed.), New York: Macmillan, pp. 268–269, ISBN 0023250356, LCCN 89-37742
- ^ a b c d e Goldrei, Derek (1996), Classic Set Theory, London: Chapman and Hall, p. 3, ISBN 0-412-60610-0
- ^ a b c d Goldrei, Derek (1996), Classic Set Theory, London: Chapman and Hall, p. 4, ISBN 0-412-60610-0
- ^ Goldrei, Derek (1996), Classic Set Theory, London: Chapman and Hall, p. 5, ISBN 0-412-60610-0
- ^ Nielsen, Michael A; Chuang, Isaac L (2000), Quantum Computation and Quantum Information, New York: Cambridge University Press, p. 62, ISBN 0-521-63503-9, OCLC 43641333
- ^ Nielsen, Michael A; Chuang, Isaac L (2000), Quantum Computation and Quantum Information, New York: Cambridge University Press, pp. 69–70, ISBN 0-521-63503-9, OCLC 43641333
- ^ M. Benatia, A. Lazrik, and K. Sami, "Arabic mathematical symbols in Unicode", 27th Internationalization and Unicode Conference, 2005.
External links
- The complete set of mathematics Unicode characters
- Jeff Miller: Earliest Uses of Various Mathematical Symbols
- Numericana: Scientific Symbols and Icons
- TCAEP - Institute of Physics
- GIF and PNG Images for Math Symbols
- Mathematical Symbols in Unicode
- Using Greek and special characters from Symbol font in HTML
- Unicode Math Symbols - a quick form for using unicode math symbols.
- DeTeXify handwritten symbol recognition — doodle a symbol in the box, and the program will tell you what its name is
Some Unicode charts of mathematical operators:
- Index of Unicode symbols
- Range 2100 – 214F: Letterlike Symbols
- Range 2190 – 21FF: Arrows
- Range 2200 – 22FF: Unicode Mathematical Operators
Some Unicode cross-references:
- Short list of commonly used LaTeX symbols and Comprehensive LaTeX Symbol List
- MathML Characters - sorts out Unicode, HTML and MathML/TeX names on one page
- Unicode values and MathML names
- Unicode values and Postscript names from the source code for Ghostscript